



Harmonic Drive Reducer Shaft Type model SHF-S-14 / SHF-S-17 / SHF-S -20 / SHF-S -25 / SHF-S-32. Jenis SHF-S adalah jenis gegelang GIGAGER siri gear harmonik. Prinsip pengurangan gear harmonik GIGAGER adalah menggunakan gerakan relatif Flexspline, Spline Pekeliling dan penjana gelombang, terutamanya ubah bentuk anjal elastik yang terkendali untuk merealisasikan gerakan dan penghantaran kuasa.
1. Apakah ciri Produk GIGAGER Harmonic Drive?
• Prestasi kos yang tinggi
• Kecekapan tinggi
• tindak balas rendah
• Ketegaran tinggi
2. SHF Shaft Series Harmonic Drive
Siri | Taipkan | Spec | Nisbah gear | |||||
SHF | S (Shaft) | 14 | 30 | 50 | 80 | 100 | - | - |
| 17 | 30 | 50 | 80 | 100 | - | - | ||
| 20 | 30 | 50 | 80 | 100 | 120 | - | ||
| 25 | 30 | 50 | 80 | 100 | 120 | 160 | ||
| 32 | 50 | 80 | 100 | 120 | - | - | ||
Untuk lebih banyak siri CSF, SHD, CSD, sila lihat Katalog yang dilampirkan. (muat turun PDF di halaman ini)
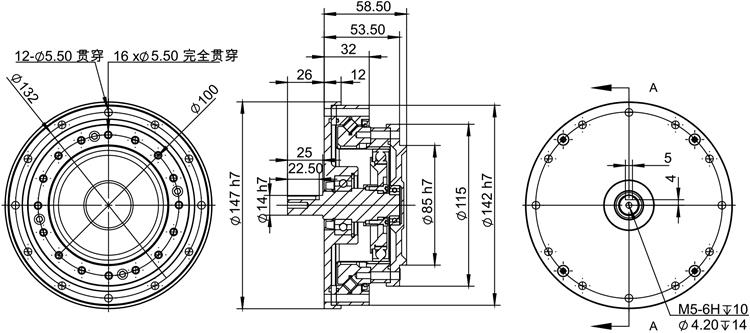
Model: SHF-S-14

Item | Nisbah gear | ||||
| 30K | 50K | 80K | 100K | ||
Nilai Tork (Input 2000r / min) | Nm | 3.8 | 5.1 | 7.4 | 7.4 |
Maksimum Maksimum Tork (Mula • Berhenti) | Nm | 8.6 | 17 | 22 | 27 |
Nilai Maksimum Maksimum Purata Beban Tork | Nm | 7.8 | 6.6 | 10.5 | 10.5 |
Tepat Maksimum Maksimum Tork | Nm | 16 | 33 | 45 | 51 |
Kelajuan Berputar Input Maksimum yang dibenarkan | r / min | 8000 | 8000 | 8000 | 8000 |
Purata kelajuan berputar input yang dibenarkan | r / min | 3500 | 3500 | 3500 | 3500 |
Backlash | Arc sec | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 |
Jangka Masa Direka | jam | 10000 | 10000 | 15000 | 15000 |
Model: SHF-S-17

Item | Nisbah gear | ||||
| 30K | 50K | 80K | 100K | ||
Nilai Tork (Input 2000r / min) | Nm | 8.4 | 15.2 | 21 | 23 |
Maksimum Maksimum Tork (Mula • Berhenti) | Nm | 15.2 | 32 | 41 | 52 |
Nilai Maksimum Maksimum Purata Beban Tork | Nm | 11.5 | 25 | 26 | 38 |
Tepat Maksimum Maksimum Tork | Nm | 29 | 66 | 83 | 108 |
Kelajuan Berputar Input Maksimum yang dibenarkan | r / min | 7000 | 7000 | 7000 | 7000 |
Purata kelajuan berputar input yang dibenarkan | r / min | 3500 | 3500 | 3500 | 3500 |
Backlash | Arc sec | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 |
Jangka Masa Direka | jam | 10000 | 10000 | 15000 | 10000 |
Model: SHF-S-20

Item | Nisbah gear | |||||
| 30K | 50K | 80K | 100K | 120K | ||
Nilai Tork (Input 2000r / min) | Nm | 14 | 24 | 32 | 38 | 38 |
Maksimum Maksimum Tork (Mula • Berhenti) | Nm | 26 | 53 | 70 | 78 | 83 |
Nilai Maksimum Maksimum Purata Beban Tork | Nm | 19 | 32 | 45 | 47 | 47 |
Tepat Maksimum Maksimum Tork | Nm | 48 | 93 | 121 | 140 | 140 |
Kelajuan Berputar Input Maksimum yang dibenarkan | r / min | 6000 | 6000 | 6000 | 6000 | 6000 |
Purata kelajuan berputar input yang dibenarkan | r / min | 3500 | 3500 | 3500 | 3500 | 3500 |
Backlash | Arc sec | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 | ≦ 10 |
Jangka Masa Direka | jam | 10000 | 10000 | 15000 | 15000 | 15000 |
Model: SHF-S-25

Item | Nisbah gear | ||||||
| 30K | 50K | 80K | 100K | 120K | 160K | ||
Nilai Tork (Input 2000r / min) | Nm | 26 | 37 | 60 | 64 | 64 | 64 |
Maksimum Maksimum Tork (Mula • Berhenti) | Nm | 48 | 93 | 130 | 149 | 159 | 167 |
Nilai Maksimum Maksimum Purata Beban Tork | Nm | 36 | 52 | 83 | 103 | 103 | 103 |
Tepat Maksimum Maksimum Tork | Nm | 90 | 177 | 242 | 270 | 289 | 298 |
Kelajuan Berputar Input Maksimum yang dibenarkan | r / min | 5500 | 5500 | 5500 | 5500 | 5500 | 5500 |
Purata kelajuan berputar input yang dibenarkan | r / min | 3500 | 3500 | 3500 | 3500 | 3500 | 3500 |
Backlash | Arc sec | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 | ≦ 10 | ≦ 10 |
Jangka Masa Direka | jam | 10000 | 10000 | 15000 | 15000 | 15000 | 15000 |
Model: SHF-S-32
Item | Nisbah gear | ||||
| 50K | 80K | 100K | 120K | ||
Nilai Tork (Input 2000r / min) | Nm | 72 | 112 | 130 | 130 |
Maksimum Maksimum Tork (Mula • Berhenti) | Nm | 205 | 289 | 325 | 335 |
Nilai Maksimum Maksimum Purata Beban Tork | Nm | 103 | 159 | 208 | 205 |
Tepat Maksimum Maksimum Tork | Nm | 363 | 540 | 635 | 652 |
Kelajuan Berputar Input Maksimum yang dibenarkan | r / min | 4500 | 4500 | 4500 | 4500 |
Purata kelajuan berputar input yang dibenarkan | r / min | 3500 | 3500 | 3500 | 3500 |
Backlash | Arc sec | ≦ 20 | ≦ 10 | ≦ 10 | ≦ 10 |
Jangka Masa Direka | jam | 10000 | 15000 | 15000 | 15000 |
3. Mengapa memilih GIGAGER?




4. Pengetahuan Berkaitan
Mekanik Memandu Harmonik
Teori pemanduan gelombang terikan didasarkan pada dinamik elastik dan menggunakan fleksibiliti logam. Mekanisme ini mempunyai tiga komponen asas: penjana gelombang (2 / hijau), splen flex (3 / merah), dan spline bulat (4 / biru). Versi yang lebih kompleks mempunyai komponen keempat yang biasanya digunakan untuk memendekkan panjang keseluruhan atau untuk meningkatkan pengurangan gear dalam diameter yang lebih kecil, tetapi masih mengikut prinsip asas yang sama.
Penjana gelombang terdiri daripada dua bahagian berasingan: cakera elips yang dipanggil palam penjana gelombang dan bebola bebola luar. Palam gear dimasukkan ke dalam galas, memberikan galas bentuk elips juga.
Spline flex dibentuk seperti cawan cetek. Sisi spline sangat tipis, tetapi bahagian bawahnya agak tegar. Ini mengakibatkan kelonggaran yang ketara pada dinding di hujung terbuka kerana dinding nipis, dan di sisi tertutup yang agak tegar dan dapat dikawal dengan ketat (ke aci, contohnya). Gigi diposisikan secara lentur di luar pinggir flex. Split flex sesuai ketat penjana gelombang, supaya apabila palam penjana gelombang diputar, splen flex berubah bentuk kepada elips berputar dan tidak meleleh ke atas cincin elips luar bebola galas. Galas bebola membolehkan splen flex berputar secara bebas ke aci penjana gelombang.
Spline bulat adalah cincin bulat yang tegar dengan gigi di dalamnya. Split flex dan penjana gelombang diletakkan di dalam spline pekeliling, memotong gigi splen flex dan spline bulat. Kerana spline flex berubah menjadi bentuk eliptik, giginya hanya benar-benar memotong dengan gigi spline bulat di dua wilayah pada sisi bertentangan spline flex (terletak pada paksi utama elips).
Anggapkan bahawa penjana gelombang adalah putaran input. Apabila palam penjana gelombang berputar, gigi splen flex yang disambungkan dengan spline bulat berubah perlahan. Puncak utama elips lenturan flex berputar dengan penjana gelombang, jadi titik-titik di mana mata gigi berputar di sekitar titik tengah pada kadar yang sama dengan batang penjana gelombang. Kunci kepada reka bentuk gear gelombang terikan adalah bahawa terdapat gigi yang lebih sedikit (selalunya contohnya dua kurang) pada splen flex daripada terdapat pada spline pekeliling. Ini bermakna bahawa bagi setiap putaran penuh penjana gelombang, splen flex diperlukan untuk memutar sedikit jumlah (dua gigi dalam contoh ini) bersandar ke spline bulat. Oleh itu, tindakan penggiliran penjana gelombang menyebabkan putaran flex yang lebih perlahan dalam arah yang bertentangan.
Untuk mekanisme pemancaran gelombang terikan, nisbah pengurangan gearing dapat dikira dari jumlah gigi pada setiap gear:

Sebagai contoh, jika terdapat 202 gigi pada spline bulat dan 200 pada spline flex, nisbah penurunan adalah (200 - 202) / 200 = -0.01
Oleh itu, flex spline berputar pada 1/100 kelajuan palam penjana gelombang dan ke arah yang bertentangan. Nisbah pengurangan yang berbeza ditetapkan dengan mengubah bilangan gigi. Ini boleh dicapai dengan mengubah garis pusat mekanisme atau dengan menukar saiz gigi individu dan dengan itu mengekalkan saiz dan beratnya. Julat nisbah gear yang mungkin terhad oleh had saiz gigi untuk konfigurasi yang diberikan.
Cool tags: robot pemacu harmonik sendi, China, pengeluar, pembekal, kilang, berkualiti tinggi




